

Perbedaan antara encoder absolut dan tambahan

- 4283
- 137
- Ricky Huels
Deteksi gerakan sudut dan linier adalah fungsi kunci dalam mengendalikan mesin di pabrik elektronik. Komputer mikro dalam mesin ini sering membutuhkan informasi tentang posisi, arah rotasi, dan kecepatan rotasi poros atau poros, yang perlu dikonversi menjadi bentuk digital. Encoder optik adalah perangkat elektro-mekanis yang digunakan untuk mengukur posisi sudut atau linier. Yang digunakan untuk deteksi sudut biasanya disebut sebagai rotary atau poros encoder. Ini semakin banyak digunakan untuk banyak pekerjaan di konsumen dan peralatan industri. Encoder putar, atau encoder poros, pada prinsipnya, dapat menjadi absolut atau bertahap. Encoder absolut memberikan informasi posisi ketika daya hilang, sedangkan enkoder tambahan digunakan di mana kecepatan dan informasi arah diperlukan. Keduanya dapat digunakan dengan perpindahan sudut dan linier, tetapi mereka beroperasi secara berbeda. Mari kita lihat secara terperinci tentang bagaimana mereka berbeda satu sama lain.
Apa itu encoder mutlak?
Encoder absolut memiliki kode unik untuk setiap posisi poros yang mewakili posisi absolut dari encoder. Ini secara langsung memberikan output digital yang mewakili perpindahan absolut. Nilai posisi aktual diukur segera saat sistem dinyalakan. Dengan demikian, enkoder absolut tidak memerlukan penghitung karena nilai yang diukur diturunkan langsung dari pola kelulusan. Ini memberikan output digital yang sesuai dengan posisi secara langsung. Setiap posisi bit secara terpisah dikodekan melalui pasangan LED khusus. Setiap kode mewakili posisi sudut absolut poros dalam rotasinya. Disk enkoder absolut menggunakan kode abu -abu di mana satu bit berubah pada satu waktu, yang mengurangi kesalahan komunikasi enkoder. Mereka dapat dibagi menjadi satu t-turn dan encoder multi-turner.
Apa itu encoder tambahan?
Encoder tambahan adalah perangkat elektro-mekanis yang mengubah posisi sudut poros menjadi sinyal digital atau pulsa. Ini menghasilkan sejumlah pulsa per revolusi, memberikan denyut nadi untuk setiap kenaikan yang sesuai dengan revolusi. Itu dapat mengukur perubahan posisi, bukan posisi absolut. Oleh karena itu, ia tidak dapat menentukan posisi relatif terhadap referensi yang diketahui. Jumlah pulsa yang dihasilkan sebanding dengan posisi sudut poros. Encoder tambahan digunakan dalam aplikasi di mana kecepatan atau informasi kecepatan dan arah diperlukan. Setiap kali perangkat dinyalakan atau diatur ulang, itu mulai menghitung dari nol dan menghasilkan sinyal output setiap kali poros bergerak. Jenis -jenis enkoder tambahan mungkin lebih jauh dibagi menjadi encoder quadrature dan tachometer.
Perbedaan antara encoder absolut dan tambahan
Dasar -dasar vs absolut. Encoder tambahan
- Keduanya adalah perangkat elektro-mekanis yang digunakan untuk mengukur posisi sudut atau linier poros dan mengubahnya menjadi sinyal digital atau pulsa. Encoder absolut memiliki kode unik untuk setiap posisi poros yang mewakili posisi absolut dari encoder, sedangkan enkoder tambahan menghasilkan sinyal output setiap kali poros memutar sudut tertentu dan jumlah pulsa yang dihasilkan sebanding dengan posisi sudut dari pada batang. Encoder tambahan dapat mengukur perubahan posisi, bukan posisi absolut.
Prinsip Operasi VS Absolute. Encoder tambahan
- Encoder absolut terdiri dari disk kode biner yang dipasang pada poros sehingga berputar dengan poros. Berkat sejumlah saluran output, setiap posisi sudut poros dijelaskan oleh kode uniknya sendiri. Jumlah saluran meningkat dengan meningkatnya resolusi yang diperlukan. Tidak seperti enkoder tambahan, itu bukan perangkat penghitung yang tidak kehilangan informasi posisi saat daya hilang. Encoder tambahan, di sisi lain, memberikan sinyal output untuk peningkatan posisi sudut poros yang ditentukan dengan menghitung pulsa output relatif terhadap titik referensi.
Penghematan biaya
- Matriks kode dari disk enkoder lebih kompleks dan karena lebih banyak sensor cahaya diperlukan, enkoder absolut biasanya harganya dua kali lipat dari encoder tambahan. Resolusi ini dibatasi oleh jumlah trek pada disk enkoder, jadi menjadi lebih mahal untuk mendapatkan resolusi yang lebih baik tanpa menambahkan lebih banyak trek. Encoder tambahan, sebaliknya, kurang kompleks dari rekan absolutnya, sehingga biasanya lebih murah.
Stabilitas
- Encoder absolut dapat menawarkan kinerja yang lebih baik, hasil yang akurat, dan biaya keseluruhan yang lebih rendah. Berkat kemampuannya untuk memberikan bacaan sudut absolut, bahkan jika bacaan terlewatkan, itu tidak akan mempengaruhi bacaan berikutnya. Bacaan tertentu tidak tergantung pada keakuratan bacaan sebelumnya. Encoder tambahan, di sisi lain, perlu didukung di seluruh operasi perangkat. Setiap kali daya hilang, bacaan harus diinisialisasi ulang atau sistem menunjukkan kesalahan. Ini memperlambat kinerja sistem. Encoder absolut tidak kehilangan informasi posisi jika terjadi kegagalan daya.
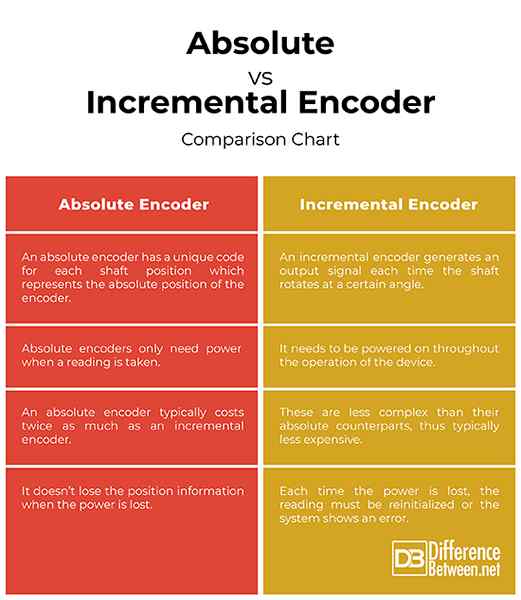
Vs absolut. Encoder tambahan: Bagan perbandingan
Ringkasan VS Absolute. Encoder tambahan
Singkatnya, enkoder tambahan perlu ditenagai sepanjang operasi perangkat. Dalam hal kegagalan daya, bacaan harus diinisialisasi ulang atau sistem memperkenalkan kesalahan. Encoder absolut, sebaliknya, membutuhkan kekuatan hanya ketika pembacaan diambil dan berkat kemampuannya untuk memberikan bacaan sudut absolut, bacaan tertentu tidak tergantung pada keakuratan bacaan sebelumnya. Namun, matriks kode dari disk dalam enkoder absolut lebih kompleks, sehingga biasanya harganya dua kali lebih banyak dari encoder tambahan, yang di sisi lain, kurang kompleks, jadi harganya lebih murah mahal mahal.